
گينٽري روبوٽ هڪ ڪالمن فريم، X-axis جزو، Y-axis جزو، Z-axis جزو، فيڪٽر ۽ ڪنٽرول باڪس تي مشتمل آهي.
اهو هڪ مڪمل طور تي خودڪار صنعتي سامان آهي جيڪو مستطيل X، Y، Z ٽي-dimensional ڪوآرڊينيٽ سسٽم تي ٻڌل آهي، جيڪو ورڪ جي پوزيشن کي ترتيب ڏئي سگهي ٿو يا ورڪ پيس جي پيچري واري حرڪت کي محسوس ڪري سگهي ٿو. ان جو ڪنٽرول ڪور صنعتي ڪنٽرولرز ذريعي لاڳو ڪيو ويو آهي.
ڪنٽرولر مختلف ان پٽ سگنلن جو تجزيو ۽ عمل ڪري ٿو، منطقي فيصلا ڪري ٿو، پوءِ ايڪس، Y، ۽ Z محور جي وچ ۾ گڏيل حرڪت کي مڪمل ڪرڻ لاءِ هر آئوٽ پٽ جزءَ تي عملدرآمد حڪم جاري ڪري ٿو ۽ مڪمل طور تي خودڪار آپريشن جي عملن جي مڪمل سيٽ کي محسوس ڪري ٿو.
اهو پيداوار اسيمبلي ۽ ٽرانسپورٽ، conveyor نظام، ۽ اڻڄاتل ڪم سائيٽن ۾ استعمال ڪيو ويندو آهي. اهو عارضي اسٽوريج ۽ رسد لاءِ هڪ اهم پردي سامان طور استعمال ڪري سگهجي ٿو ۽ آسان استعمال لاءِ ميزبان سامان سان لچڪدار طور تي ملائي سگهجي ٿو. ايپليڪيشن انڊسٽريز ۾ شامل آهن: فائنل اسيمبلي، ذيلي اسيمبلي، پروسيسنگ، ٽيسٽ، ڊيبگنگ ۽ پروڊڪٽس جي نقل و حمل وغيره.
پراڊڪٽ جون خاصيتون گراهڪ جي مدد ڪرڻ لاءِ آھن گھٽ ڪارڪردگيءَ جي مسئلن کي حل ڪرڻ ۾ يا مختلف قسم جي مواد جي ھٿ ڪرڻ ۾ اعليٰ ھينڊلنگ جي خطرن کي، جيئن آسانيءَ سان ۽ تڪڙو ھٿ ڪرڻ جي خطرن کي گھٽائي سگھجي، وقت، ڪوشش، مزدوري کي بچايو وڃي ۽ مزدوري کي تبديل ڪري سگھجي.
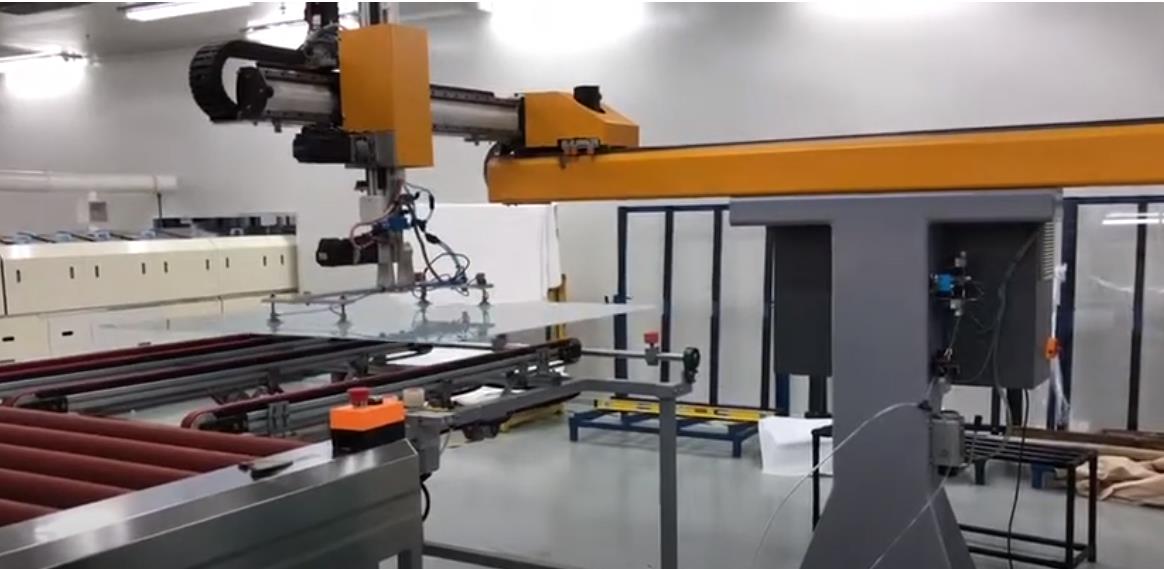
 هي گانٽري ٽرس مينپوليٽر هينڊلنگ ڊوائيس شيشي لاءِ شامل آهن ڪالمن ۽ ڪراس بيم ڪالمن تي نصب ٿيل آهن. ڪراس بيم سلائڊ ريل سان نصب ٿيل آهن. سلائڊ ريل هڪ ٽرانسورس سلائنگ ڊوائيس سان نصب ٿيل آهن. ٽرانسورس سلائيڊنگ ڊيوائس عمودي سلائيڊنگ ڊيوائس ۽ نيوميٽڪ سکشن کپ ڊيوائس سان انسٽال ٿيل آهي. اهو محسوس ڪري سگهجي ٿو ته ٽرانسپورٽ ميڪانيزم ٽن طرفي خلا ۾ هڪ مقرر نقطي تي حرڪت ڪري ٿو، شيشي کي سکشن کپ ذريعي چوسي ٿو، پهرين دير سان X-axis تي، پوء 90 درجا ڦيرايو مقرر ڪيل پوزيشن ڏانهن، ۽ پوء مٿي وڃو. ۽ هيٺ Y-axis تي. سيٽ پوزيشن تي پهچڻ کان پوء، گلاس کي ڇڏي ڏيو ۽ ان کي شيشي جي شيلف تي رکو. سڄي ڊوائيس جي ساخت جي استحڪام تمام اعلي آهي، جيڪو تمام گهڻو بهتر آهي هينڊلنگ. ڪارڪردگي.
هي گانٽري ٽرس مينپوليٽر هينڊلنگ ڊوائيس شيشي لاءِ شامل آهن ڪالمن ۽ ڪراس بيم ڪالمن تي نصب ٿيل آهن. ڪراس بيم سلائڊ ريل سان نصب ٿيل آهن. سلائڊ ريل هڪ ٽرانسورس سلائنگ ڊوائيس سان نصب ٿيل آهن. ٽرانسورس سلائيڊنگ ڊيوائس عمودي سلائيڊنگ ڊيوائس ۽ نيوميٽڪ سکشن کپ ڊيوائس سان انسٽال ٿيل آهي. اهو محسوس ڪري سگهجي ٿو ته ٽرانسپورٽ ميڪانيزم ٽن طرفي خلا ۾ هڪ مقرر نقطي تي حرڪت ڪري ٿو، شيشي کي سکشن کپ ذريعي چوسي ٿو، پهرين دير سان X-axis تي، پوء 90 درجا ڦيرايو مقرر ڪيل پوزيشن ڏانهن، ۽ پوء مٿي وڃو. ۽ هيٺ Y-axis تي. سيٽ پوزيشن تي پهچڻ کان پوء، گلاس کي ڇڏي ڏيو ۽ ان کي شيشي جي شيلف تي رکو. سڄي ڊوائيس جي ساخت جي استحڪام تمام اعلي آهي، جيڪو تمام گهڻو بهتر آهي هينڊلنگ. ڪارڪردگي.

پوسٽ ٽائيم: مارچ-18-2024



